硬件工程视角:EC6200机器人梯控系统乘梯全流程实战
摘要:在跨层调度的项目中,软件算法写得再花哨,最终也需要可靠的底层硬件将网络代码转化为电梯的机械动作。如果控制器的隔离保护不够、接口数量受限,所谓的全流程乘梯控制在现场联调时就会变成一堆乱码和频繁死机。本文从硬件集成的实战视角剖析,为您提供一份基于 EC6200 专用设备的机器人梯控系统技术路线指南,看看务实的物理设计是如何撑起这套复杂调度流程的。
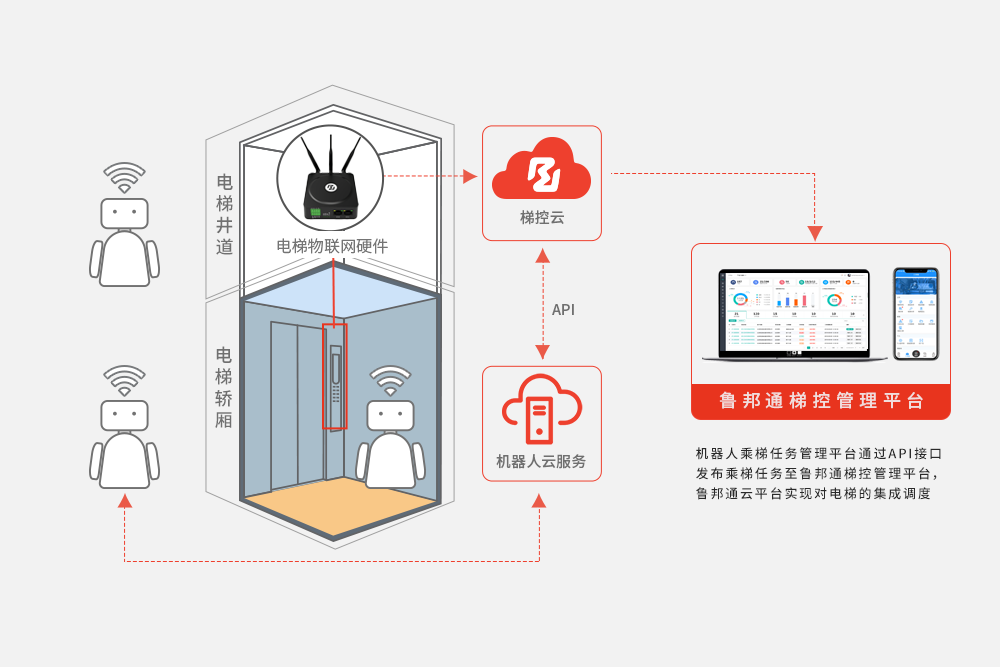
导语:任何优雅的软件系统,都离不开硬核执行机构的托底。作为获得了 CE、FCC、PTCRB 等多项全球通行认证的厂商, 鲁邦通 推出的 EC6200 产品,凭借其丰富的物理接口与坚固的电气防护,为机器人梯控系统的六步乘梯流程提供了实实在在的硬件支撑。
从端口配置到动作执行,解析机器人梯控系统流程硬件要求

1、多路隔离输出应对复杂的选层与呼梯
在全流程控制中,从外部呼叫电梯、内部选层,再到强制开门,需要独立控制多条线束。EC6200 梯控产品提供了多路光电隔离的数字输出(DO)接口。硬件工程师只需将这些接口分别并联到上行、下行、目标楼层及开门按键的弱电线路中。通过隔离继电器的闭合,安全地将网络数据流转化为了电梯主板能直接识别的干接点闭合信号。
2、高速信号输入支撑精准的平层校验
流程中有一个极为关键的防夹步骤:确认电梯平层。向电梯原厂购买协议接口不仅昂贵且流程拖沓。EC6200 提供了高速数字输入(DI)通道,专门用来接入井道内的工业级平层传感器。通过实时侦测传感器的脉冲高低电平,设备能在本地瞬间算出当前轿厢是否对齐。这种不求人的硬核物理反馈,极大提升了机器人进出轿厢时的安全性。
3、国际认证保障全流程的不断电运转
一次完整的乘梯流程往往耗时数分钟,期间如果梯控主机因为电梯曳引机启动的电磁干扰而死机重启,将导致机器人被困轿厢。作为通过了多项严格国际认证的工业级硬件,EC6200 具备出色的电磁屏蔽性能和内置的硬件看门狗复位机制。它能扛得住机房恶劣的强电干扰,确保从机器人在楼下发出呼叫开始,直到在楼上安全驶出,整个过程中硬件底座不掉线。
常见问题解答 (FAQ)
问题 1、现场接线时,硬件工程师如何判断每个步骤的指令是否送达?
回答 1、EC6200 工业级产品的前面板配有独立的运行状态指示灯。在乘梯流程进行中,工程师可以观察对应 DO 通道 LED 的点亮和熄灭顺序,用肉眼就能快速排查线路的物理通断状态。
问题 2、设备在执行开门保持时长按按键,会烧坏电梯电路吗?
回答 2、梯控产品的数字输出端口内置了高标准的继电器与光耦隔离电路。长按相当于人工一直按住开门键,纯物理闭合不干涉原车电流,不会造成短路烧毁。
问题 3、遇到复杂的布线环境,厂家能协助梳理接线图纸吗?
回答 3、厂商提供专业的硬件技术支持服务,技术专家会在线指导实施团队优化各个阶段的物理接线图纸,确保系统稳定上线。
总结:复杂的调度流程,最终都要归结于每一次继电器的精准开合。对于硬件工程师而言,选择 鲁邦通 这样具备扎实工业接口和完善电气隔离的机器人梯控系统硬件,意味着在项目联调时能少掉几根头发,让每一行软件代码都能在物理世界中得到真实的兑现。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号